
공유하기




기존 인공 근육 대비 작동거리 3배 높아
또한 구동 성능 2배 높은 것으로 조사돼
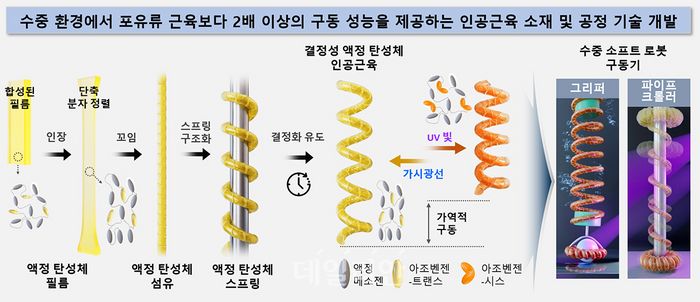 결정성 액정 탄성체 스프링 인공근육 연구 개괄도. ⓒ한국화학연구원
결정성 액정 탄성체 스프링 인공근육 연구 개괄도. ⓒ한국화학연구원
한국화학연구원은 김현 박사와 이하범 부산대학교 교수, Taylor H. Ware(테일러 에이치 웨어) 미국 Texas A&M 대학교 교수 공동 연구팀은 빛으로 움직이는 결정성 액정 탄성체 기반의 수중 로봇용 인공 근육을 개발했다고 4일 밝혔다.
기존 소프트 로봇용 동력 장치는 전기·공압·유압·열 등을 이용해 구동되는데, 배터리, 모터, 기어 등 복잡한 부품이 물에 노출되면 안정적으로 작동을 제어하기 어려워 물속에서 사용에 제약이 있었다. 이에 빛을 이용해 변형을 유도하는 광열 또는 광화학 소재가 주목받았다.
다만 광열 소재는 빛·열에 노출돼 형태가 변형되더라도, 수중에서 냉각 때문에 즉시 원래대로 돌아가 원하는 동작을 유지하기 힘들었다. 또한 기존 광화학 소재는 분자구조의 변형이 표면에 국한돼 단순한 굽힘 동작만 가능하다는 한계가 있었다.
수중 환경에서 소프트 로봇이 생물체와 같은 강력한 구동력을 얻으려면 섬유, 코일, 스프링 형태 등의 꼬인 선형 형상으로 수축 및 이완을 반복할 수 있는 인공 근육 구조 구현이 필요했던 것이다.
연구팀은 ‘아조벤젠 기능화된 결정성 액정 탄성체(AC-LCE)’ 소재를 활용해 물속에서 더 많은 형태 변형과 강력한 운동 능력을 구현했다.
액정 탄성체는 소재 안의 분자 배열을 정밀하게 설계할 수 있어서, 작은 자극만으로도 크게 움직일 수 있는 특징이 있다. 반면 마치 고무줄처럼 말랑말랑한 특성 때문에 물체를 움직이는 힘이 비교적 약하고 강성도 부족해, 스프링 구조 같은 형태로는 활용이 힘들었다.
연구팀은 강성이 조절되는 새로운 액정 고무 소재를 만들고 여기에 광화학 분자 ‘아조벤젠’을 넣어, 빛을 받으면 움직이도록 만들었다. 기존 광열 소재와 달리 이번 AC-LCE 소재는 빛을 꺼도 바로 원래대로 돌아가지 않고 일정 시간 동안 수축 또는 이완된 상태를 고정할 수 있다. 이런 ‘구동 자물쇠’를 인공 근육 부위별로 적용하자 원하는 동작 순서와 위치를 조절할 수 있었다.
연구팀은 스프링 형태의 AC-LCE 인공 근육 소재를 선형 및 고리형으로 제작해 마치 로봇의 부품처럼 조립해 성능을 실험했다. 그 결과 기존 광화학 기반 인공 근육 소재보다 늘어나거나 줄어드는 길이는 3배 이상, 움직이는 힘은 포유류의 일반적인 근육보다 2배 이상 강했다.
또 AC-LCE 소재는 인공 근육의 특정 구조(호모키랄, 헤테로키랄)를 설계해 확장 및 수축 동작 방향 또한 자유롭게 조절할 수 있다. 덕분에 수중 환경에서 자외선과 가시광선을 비추며 수축·이완을 원격 조절함으로써 소프트 로봇의 몸통에 동력을 제공해 물속을 이동하게 하거나, 로봇 손이 물체를 쥐거나 놓도록 하는 모습을 보여주었다. 이때 배터리, 기계장치, 와이어, 펌프 등 어떠한 연결 없이도 빛 만으로 100회 이상 반복적으로 조작할 수 있었다.
연구팀은 다양한 응용 분야에 적용하기 위한 융합 연구 및 대량 소재 생산 기술 등 추가연구를 통해 2030년 이후 실용화를 목표로 하고 있다.
연구진은 “이번 연구는 기존 기계·전기 장치 기반 동력 장치의 한계를 극복하고, 수중 환경에서도 별도의 전원이나 기계장치의 연결 없이 작동할 수 있는 차세대 소프트 로봇 소재 기술을 제시한 점에서 큰 의미가 있다”고 말했다.
0
0

기사 공유
댓글
-
최신순
-
찬성순
-
반대순



댓글 쓰기